Студентам > Курсовые > Расчет настроек автоматического регулятора
Расчет настроек автоматического регулятораСтраница: 11/11
Так
как настройки регулятора не могут быть отрицательными то ограничимся 3
квадрантом. И с помощью программы на BASIC рассчитаем оптимальные настройки для
ПИ - регулятора методом Стефани по следующим формулам:
A^2(m,w)
m 1
Tu = ------------------------ , kp = ---------- -
----------
w(m^2+1)* v(m,w) v(m,w)
u(m,w)
наибольшее
отношение kp/Tu и будет оптимальными настройками.
Получили
что kp = 1.712763
Tu = 4.47537
В
программе SIAM с помощью схемы для одноконтурной системы без запаздывания
получаем переходные процессы по заданию и по возмущению:


Сравнивая
график кривой разгона по основному каналу и переходный процесс внутреннего
контура каскадной системы делаем вывод о том, что за время запаздывания
основного контура переходный процесс во внутреннем контуре затухнуть не
успевает, следовательно передаточная функция эквивалентного объекта имеет вид:
Wоб(s)
* Wp1(s)
Wоб(s) = --------------------------- =
1 + Wоб1(s) * Wp1(s)
1 1
--------------------------------- * (1,7128 +
---------- )
2 4,4754s
38,1160s + 10,6679s + 1
--------------------------------------------------------------
=
0,4s +
1 1
1 + --------------------------- * (1,7128 +
----------)
2 4,4754s
14,0904s + 6,9614s + 1
3 2
107.9987s + 67.4444s + 14.6247s + 1
= ---------------------------------------------------------------------------
5
4 3 2
4116.4785s + 3186.9547s + 969.316s + 138.1861s +
15.7294s + 1
Определяем
настройки ведущего регулятора. Для ПИ-регулятора получаем:
kp
= 0.1249
Tu
= 5.4148
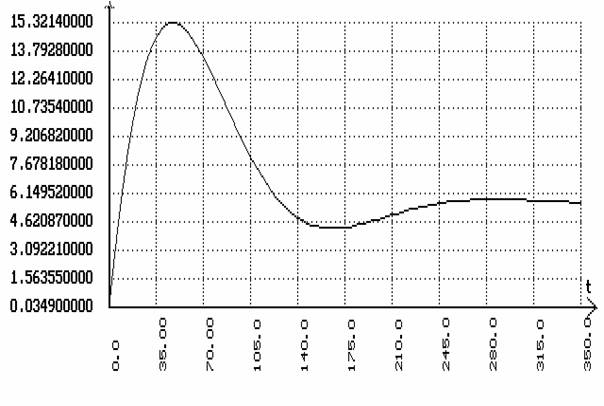
В
программе SIAM с помощью схемы каскадной системы получаем переходный процесс по
заданию:


С
помощью схемы каскадной системы получаем переходный процесс по возмущению:


б)
для реальной передаточной функции.
Определим
настройки внутреннего регулятора для объекта второго порядка с передаточной
функцией
1
W1(s) =-------------------------
2
16,1604s + 8.04s + 1
Получаем
следующие настройки регулятора: kp = 4.3959
Tu = 6.5957
В
программе SIAM пользуясь схемой одноконтурной системы без запаздывания получаем
графики переходных процессов по заданию и по возмущению:


Сравнивая
график кривой разгона по основному каналу и переходный процесс внутреннего
контура каскадной системы делаем вывод о том, что за время запаздывания
основного контура переходный процесс во внутреннем контуре затухнуть не
успевает, следовательно передаточная функция эквивалентного объекта имеет вид:
Wоб(s)
* Wp1(s)
Wоб(s) = --------------------------- =
1 + Wоб1(s) * Wp1(s)
1 1
--------------------------------- * (4.3959 +
---------- )
3
2 6.5957s
91.125s + 60.75s + 13.5s + 1
--------------------------------------------------------------
=
1 1
1 + ------------------------ * (4.3959 +
----------)
2 6.5957s
16.1604s + 8.04s + 1
3 2
468.5449s + 249.2673s + 37.0334s + 1
=
--------------------------------------------------------------------------------------------
6 5
4 3 2
42696.154s + 49705.969s + 25770.6474s + 7229.3112s +
1076.6779s+71.4868s+ 1
Определяем
настройки ведущего регулятора. Для ПИ-регулятора получаем:
kp
= 1.2822
Tu
= 6.3952
В
программе SIAM с помощью схем для каскадной системы получим переходные процессы
по заданию и по возмущению:

Расчет комбинированной АСР.
а)
для эксперементальной передаточной функции
Расчет
компенсирующего устройства
В
программе SIAM с помощью смоделированной схемы комбинированной системы без
компенсатора получим соответствующий переходный процесс:


Определим
передаточную функцию фильтра для структурной схемы где выход компенсатора
поступает на вход регулятора по формуле:
Wов(s)
Wф(s) = --------------------- ,
Wоб(s) * Wр(s)
где
Wов(s) - передаточная функция канала по возмущению,
Wоб(s) - передаточная функция объекта,
Wp(s) - передаточная функция регулятора
0,6887s + 1
-----------------------------
2
30.8783 s + 10.2426 s + 1
Wф(s) =
---------------------------------------------------------- =
1 1
------------------------------- *
(1.0796 + ---------- )
2 8.0434 s
38.8783 s + 10.6679 s + 1
4
3 2
232.5099 s + 40.1406 s + 98.6173 s +
8.6837 s
=
-----------------------------------------------------------
3 2
268.1379 s + 119.8220 s + 18.9263 s + 1
Настроечные
параметры компенсирующего устройства будут оптимальными, если АФХ фильтра равны
нулю при нулевой и резонансной частоте.
б)
для реальной передаточной функции
Copyright © Radioland. Все права защищены.
Дата публикации: 2004-09-01 (0 Прочтено) | 

